Research Area:
Responsible:
Participants:
Research Lines:
Project abstract
This research activity has been developed within the FIRB Vicom (Virtual Immersive COMmunication) project. The aim was the development of advanced techniques for the localization of fixed/moving terminals in wireless networks such as: 2G/3G or beyond mobile systems (GSM, UMTS, WiMAX, etc.), wireless local area networks or WLAN (Bluetooth, WiFi, etc.), wireless personal area networks or WPAN (based on UWB, or ZigBee, or MOTEs, etc.).
Wireless localization is a topic of great interest nowadays as its applications to emergency, security, environmental monitoring and location-aware services is expected to play an important role in the near future wireless markets. The localization of fixed/moving subscriber stations (SS) is usually obtained by exchanging radio signals with reference access points (AP) or base stations (BS) placed in known positions.
The unknown SS position is usually derived by measuring parameters related to the SS location, such as times of arrival (TOA), time differences of arrival (TDOA), angles of arrival (AOA) and received signal strength (RSS), and then combining these measurements by means of multi-lateration/angulation. However, false localizations often arise due to parameter estimation errors, mismodeling, over-simplified assumptions about the propagation environment, multipath effects and non-line-of-sight (NLOS) conditions. The aim of this research activity is designing Bayesian localization methods to improve the robustness against such estimation errors.
Project results
Localization techniques have been developed for fixed/moving terminals in Ultra Wide Band (UWB) WPAN, ad-hoc wireless sensor networks, WLAN, 2G/3G mobile cellular systems. Several approaches have been investigated based on either multi-lateration/angulation from TOA, TDOA, AOA, RSS measurements, or on power maps integrated with RSS statistical models. High resolution methods have also been developed for the estimation of TOA and/or AOA [1]-[2]-[3].
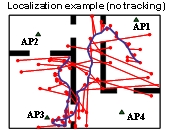
A novel approach has been proposed to track the location of a moving SS in order to alleviate the NLOS problem that arises in dense multipath indoor conditions. To reduce false localizations, both grid-based and particle filter (PF) Bayesian approaches have been proposed to jointly track the sequence of the positions and the sight conditions of the SS. These methods are based on the assumption that both the SS position and the sight condition are Markov chains whose state is hidden in the received signals (Hidden Markov Model or HMM) [5]-[6]-[7]. HMM and PF tracking solutions have been applied also to power mapping localization in WiFi networks based on the IEEE 802.11 standard [8]. To better characterize and model RSS measurements in complex propagation environments, a ray-tracing analysis has also been carried out for indoor environments with random shadowing objects [4].
- J. Picheral, U. Spagnolini, “Parametric estimation of space-time channels with spatially correlated noise by JADE-ESPRIT”, 7th International Symposium on Signal Processing and its Applications (ISSPA), Paris, July 1-4, 2003.
- J. Picheral, U. Spagnolini, “Angle and delay estimation of space-time channels for TD-CDMA systems”, IEEE Trans. Wireless Communications, Vol. 3, No. 3, pp. 758-769, May 2004.
- O. Simeone and U. Spagnolini, “Lower Bound on Training-Based Channel Estimation Error for Frequency-Selective Block-Fading Rayleigh MIMO Channels”, IEEE Trans. Signal Processing, Vol. 52, No. 11, pp. 3265 – 3277, Nov. 2004.
- A.V. Bosisio, U. Spagnolini, “Indoor localization by attenuation maps: model-based interpolation for random medium”, 9th Int. Conf. on Electromagnetics in Advanced Applications (ICEAA2005), pp.1-4, September 2005.
- C. Morelli, M. Nicoli, V. Rampa, U. Spagnolini, “Hidden Markov models for radio localization of moving terminals in LOS/NLOS conditions”, Proc. IEEE ICASSP 2005, Vol. 4, pp. 877-880, March 2005.
- M. Nicoli, C. Morelli, V. Rampa, U. Spagnolini, “HMM-based tracking of moving terminals in dense multipath indoor environments”, Proc. EURASIP EUSIPCO 2005, September 2005.
- C. Morelli, M. Nicoli, V. Rampa, U. Spagnolini, “Hidden Markov models for radio localization in mixed LOS/NLOS conditions”, IEEE Trans. Signal Processing, to appear 2006.
- C. Morelli, M. Nicoli, V. Rampa, U. Spagnolini, C. Alippi, “Particle filters for RSS-based localization in wireless sensor networks: an experimental study”, Proc. IEEE ICASSP 2006, May 2006.