Area di ricerca:
Responsabile:
Partecipanti:
Linee di ricerca:
Sommario
L’attività di ricerca del progetto FIRB Vicom (Virtual Immersive COMmunication) è finalizzata allo sviluppo di tecniche di localizzazione di oggetti/utenti (fissi o mobili) attraverso l’utilizzo di infrastrutture wireless quali: sistemi radiomobili multi-cella (GSM, UMTS, WiMAX, etc.), WLAN (Bluetooth, WiFi, etc.), WPAN (costituite da nodi/sensori UWB, MOTE, ZigBee, etc.).
Il problema della localizzazione è di grande interesse oggigiorno in quanto indispensabile per la fornitura di svariati servizi, per esempio la gestione di situazioni di emergenza (assistenza a chiamate di emergenza, localizzazione vittime di terremoti/valanghe), servizi multimediali immersivi (servizi personalizzati che consentono l’interazione con l’ambiente circostante), sistemi di navigazione efficienti, reti ad hoc per il monitoraggio ambientale, etc. La stima della posizione del terminale è generalmente ottenuta attraverso multilaterazione/triangolazione da stazioni di riferimento (in posizioni note) oppure attraverso la creazione di mappe digitali di propagazione (per esempio mappe di potenza) acquisite in una fase preliminare di calibrazione. Problema fondamentale è costituito dagli effetti della propagazione multi-percorso e/o dall’assenza di visibilità diretta fra trasmettitore e ricevitore (no-line-of-sight, NLOS). Oggetto di questo progetto è lo sviluppo di tecniche avanzate di localizzazione per la riduzione degli errori dovuti a multicammino/NLOS in ambienti di propagazione complessi.
Risultati del progetto ed eventuali pubblicazioni scientifiche/brevetti
L’attività di ricerca ha portato allo sviluppo di metodi di localizzazione adatti a infrastrutture WPAN Ultra Wide Band (UWB), reti di sensori MOTEs, WLAN, sistemi radiomobili cellulari 2G/3G. Sono state esaminate sia tecniche di trilaterazione/triangolazione da misure di TOA, TDOA, AOA e/o potenza (RSS), sia tecniche basate su mappe di RSS integrate con modelli statistici.
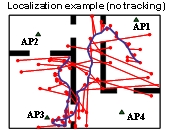
Per la stima dei parametri di propagazione sono stati proposti metodi ad alta risoluzione per la stima di tempi di arrivo (TOA) e/o angoli di arrivo (AOA) [1]-[2]-[3]. Per migliorare la risoluzione della localizzazione di terminali mobili in ambienti di propagazione complessi si è reso necessario lo sviluppo di tecniche di localizzazione che tengano conto della presenza di situazioni miste LOS/NLOS, in particolare tecniche di inseguimento basate su modelli di Markov nascosti (HMM e particle filtering) che descrivano congiuntamente la traiettoria del terminale mobile e le condizioni di visibilità LOS/NLOS [5]-[6]-[7]. Soluzioni analoghe sono state applicate a sistemi di power mapping per infrastrutture WiFi IEEE 802.11 [8]. Per meglio caratterizzare e modellare gli ambienti indoor è stata inoltre effettuata un’analisi dell’andamento della potenza in ambienti indoor in presenza di oggetti casuali di ombreggiatura (shadowing) attraverso un algoritmo di ray tracing [4].
- J. Picheral, U. Spagnolini, “Parametric estimation of space-time channels with spatially correlated noise by JADE-ESPRIT”, 7th International Symposium on Signal Processing and its Applications (ISSPA), Paris, July 1-4, 2003.
- J. Picheral, U. Spagnolini, “Angle and delay estimation of space-time channels for TD-CDMA systems”, IEEE Trans. Wireless Communications, Vol. 3, No. 3, pp. 758-769, May 2004.
- O. Simeone and U. Spagnolini, “Lower Bound on Training-Based Channel Estimation Error for Frequency-Selective Block-Fading Rayleigh MIMO Channels”, IEEE Trans. Signal Processing, Vol. 52, No. 11, pp. 3265 – 3277, Nov. 2004.
- A.V. Bosisio, U. Spagnolini, “Indoor localization by attenuation maps: model-based interpolation for random medium”, 9th Int. Conf. on Electromagnetics in Advanced Applications (ICEAA2005), pp.1-4, September 2005.
- C. Morelli, M. Nicoli, V. Rampa, U. Spagnolini, “Hidden Markov models for radio localization of moving terminals in LOS/NLOS conditions”, Proc. IEEE ICASSP 2005, Vol. 4, pp. 877-880, March 2005.
- M. Nicoli, C. Morelli, V. Rampa, U. Spagnolini, “HMM-based tracking of moving terminals in dense multipath indoor environments”, Proc. EURASIP EUSIPCO 2005, September 2005.
- C. Morelli, M. Nicoli, V. Rampa, U. Spagnolini, “Hidden Markov models for radio localization in mixed LOS/NLOS conditions”, IEEE Trans. Signal Processing, to appear 2006.
- C. Morelli, M. Nicoli, V. Rampa, U. Spagnolini, C. Alippi, “Particle filters for RSS-based localization in wireless sensor networks: an experimental study”, Proc. IEEE ICASSP 2006, May 2006.