Responsabile
Area di ricerca
Linee di ricerca
Attivit�
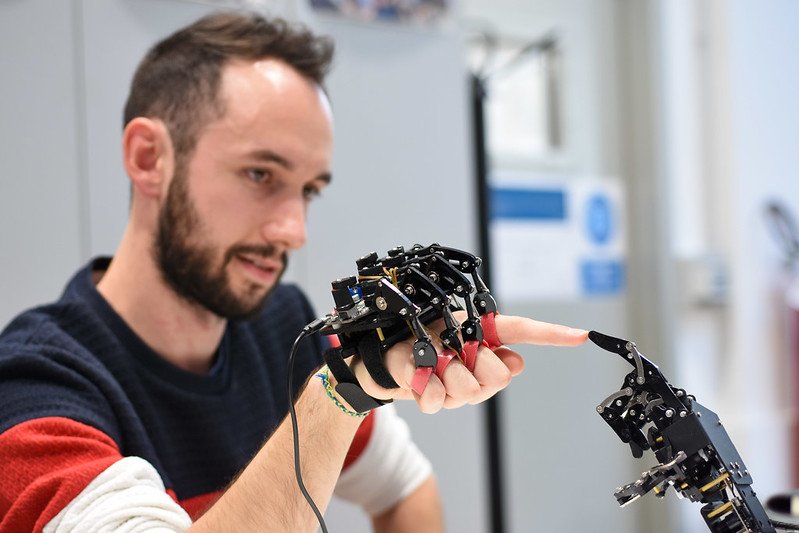
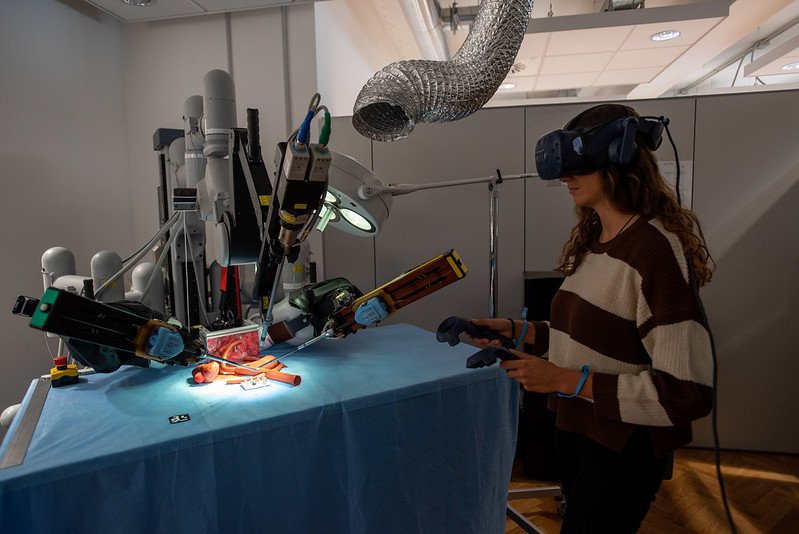
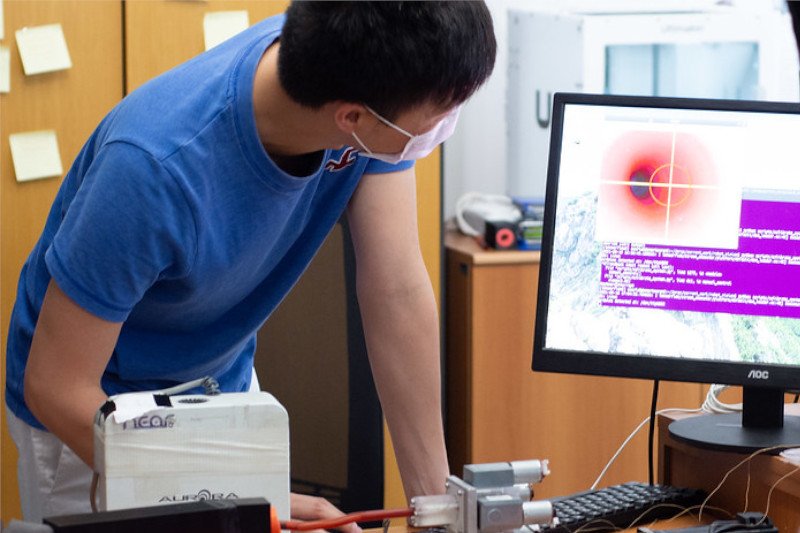
La missione del NearLab (dal 2008) è di avere un impatto sulla salute e il benessere dei cittadini, cambiando la società mediante robot medici e personali intelligenti e tecnologie personalizzate.
Il Laboratorio si occupa della ricerca nei seguenti campi:
- robotica medica: sistemi di pianificazione avanzati per procedure di neurochirurgia, sistemi di controllo per l'interazione uomo-robot, strumenti chirurgici intelligenti, apprendimento automatico in computer vision.
Contact: Elena De Momi, elena.demomi@polimi.it
- neuroingegneria: tecnologie ibride (artificiali-naturali) per la neuro-riabilitazione, vita indipendente, attività sportive di disabili e anziani; Robotica riabilitativa. Esoscheletri per applicazioni industriali. Tecnologie intelligenti per il monitoraggio trasparente e / o remoto di persone fragili e per la diagnosi precoce della degenerazione cognitiva e fisica; Studi di controllo motorio attraverso simulazioni biomeccaniche. Neuroimaging funzionale in riabilitazione. Neuroscienze computazionali e neurorobotica. Interfacce bioartificiali per neurobiologia e farmacologia.
Informazioni di servizio
Il Laboratorio è situato presso la Sezione di Bioingegneria del DEIB - Dipartimento di Elettronica, Informazione e Bioingegneria (Ed. 7, piano terra) in Piazza Leonardo da Vinci 32 e (Ed. 32.2, 4° piano) in via Colombo 40.