
Presenter: Prof. Marco Tognon
Rennes University, France
DEIB - Conference Room "E. Gatti" (Bld. 20)
December 20th, 2024 | 2.30 pm
Contact: Prof. Lorenzo Fagiano
Sommario
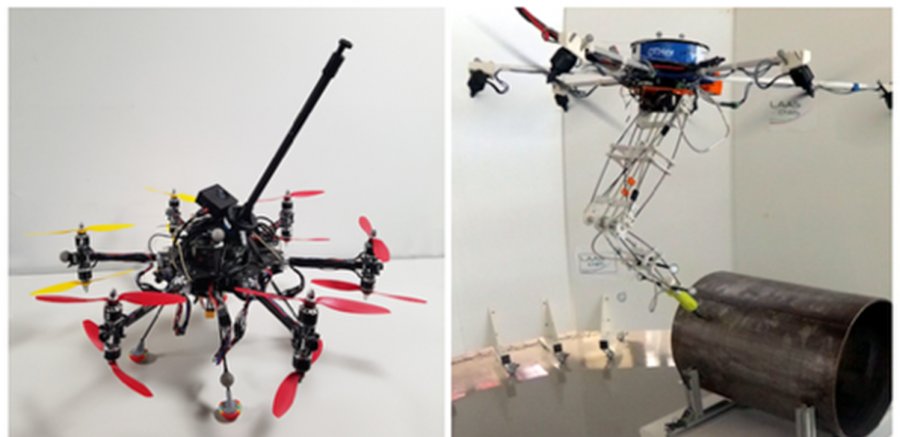
On December 20th, 2024 at 2.30 pm the seminar titled "Advancements in Aerial Physical Interaction: Design, Control and Collaboration" will take place at DEIB Conference Room "Emilio Gatti" (Building 20).Aerial robotics is nowadays seeing an exponential growth, both from the academic and industrial points of view. A lot of work has already been done for contact-free motions applied to a wide application domain, e.g., agriculture, archeology, photography, etc. However, if aerial robots were able to also interact with the environment, the application domains could be further extended toward new areas like transportation and manipulation of objects, contact-based inspection and maintenance, assembly and construction, etc.
In this talk I will describe my contribution to the field of aerial physical interaction, from showing its feasibility for simple contact tasks, to enhance manipulation capabilities for more and more complex task. I will then present my vision for the future that sees aerial manipulator capable to safely accomplish physical work in real environments, together with other robots and human operators.
Biografia
From November 2022 Dr. Marco Tognon is a tenured researcher at Inria Center of Rennes University, France, in the Rainbow team. Before he was a postdoctoral researcher in the Autonomous System Lab (ASL) at ETH Zurich, Switzerland. He received the Ph.D. degree in Robotics in 2018, from INSA Toulouse, France, developing his thesis at LAAS-CNRS. His thesis has been awarded with three prizes. He received the M.Sc. degree in automation engineering in 2014, from the University of Padua, Italy, with a master thesis carried out at MPI for Biological Cybernetics, Tubingen, Germany.He published more than 25 journal papers, and he is coordinator of the ANR project AirHandyBot. He serves as Associate Editor for IEEE Transaction of Robotics and as Area Chair for RSS2023. He is also co-chair for the IEEE TC Aerial Robotics and Unmanned Aerial Vehicles. Recently he received the IROS24 Toshio Fukuda Young Professional Award. His current research interests include robotics, aerial physical interaction, multi-robot systems, and human-robot physical interaction.